
rv32emu Introduction
rv32emu Introduction
本篇撰寫於 12/12,rv32emu 以 Commit 451f8c0 為主,semu 以 PR #66 為主,由於於 semu 上實作的特性之後會移植到 rv32emu 上,因此本文的範例 code 先以 semu 為例,少了 JIT 的部分較易理解
論文:Accelerate RISC-V Instruction Set Simulation by Tiered JIT Compilation
rv32emu 是針對 32 bit RISC-V processor model 開發的精簡高效模擬器,實作了 RISC-V ISA,支援 RV32I 與 M、A、F、C extension 以 C99 撰寫
模擬器的運作原理
模擬器是一種用軟體來模擬硬體的工具,其目的是在不同架構的電腦上運行特定架構的軟體,以我們的例子來說就是要在不同架構的電腦上運行 RISC-V 的軟體
下圖為 rv32emu 的架構圖:
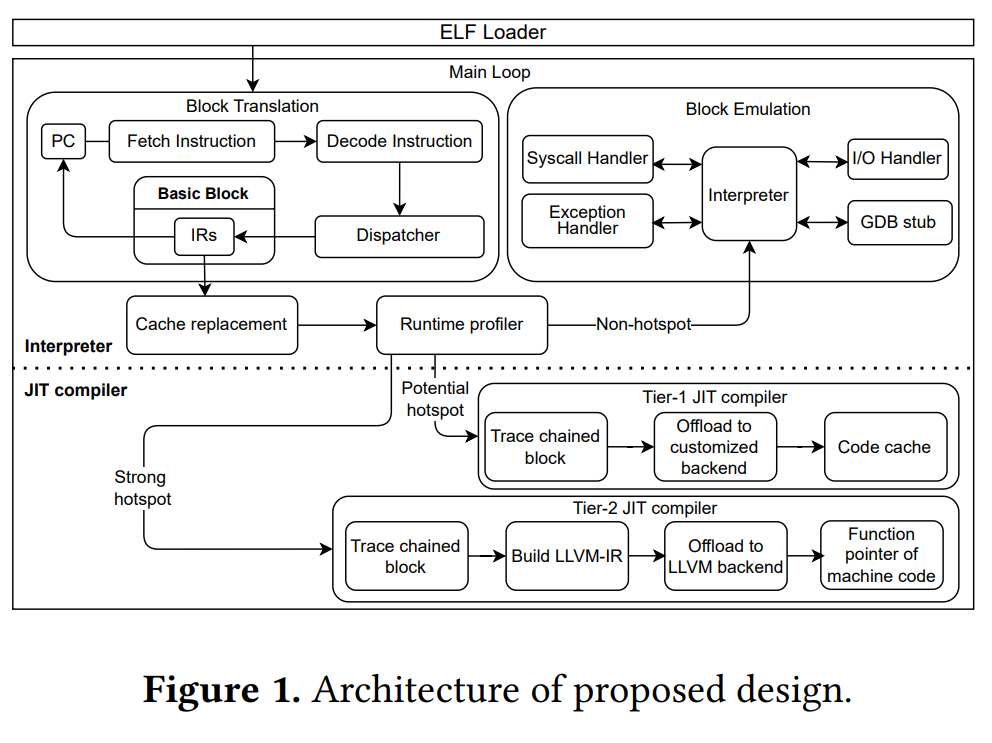
為了模擬硬體,模擬器主要的邏輯為
- 將要模擬的軟體載入到記憶體中 (load ELF)
- 指令擷取 (Instruction Fetch):從記憶體中讀取當前 PC 指向的指令
- 指令解碼 (Instruction Decode):解析指令中的欄位,例如 opcode、rd、rs1、rs2 和立即值 (immediate) 等
- 指令執行:根據解碼的結果模擬對應的運算,更新暫存器或記憶體的內容,以及調整 PC 值
後面三點可以簡稱為 CPU emulation
依照 RISC-V 的規格書定義暫存器的數量與功能,並以不同指令集定義的操作和欄位來實作 CPU decoder 與指令集對應的操作(e.g. 加減乘除),並將結果存在指定的暫存器,換句話說就是模擬 CPU 的指令周期,這樣一來就能在不同的指令集架構的電腦上模擬 RISC-V 指令集的軟體
系統模擬的組成
為了達成上面的目的,至少需要實作以下三個單元:
- ELF loader (針對系統模擬,這項非必要)
- CPU emulator
- Memory I/O
這三個是一定要完成的部分,完成了這三個就可以模擬一些簡單的 bare metal program 了
但是如果要有更完整的模擬,像是 linux kernel 這樣複雜的軟體,那就需要根據需求多實作其他單元,像是
- MMU
- 以 RISC-V 的 virtual-memory system 來說,
SXLEN=32時使用 SV32 model,SXLEN=64時使用 SV39、SV48 或 SV57 model,詳見 priviledge spec 中的第 12 節 satpCSR 控制 S mode 下的位址轉換與保護,此暫存器會保存 root page table 的物理頁號(PPN)與 ASID- linux kernel 利用 virtual memory(VM) 的機制來實現記憶體管理的機制,但在 linux 中 VM 是透過 MMU 來實作的
- 在缺乏 MMU 的環境下,如一些 microcontroller,使用的是 uClinux,其為「MicroController Linux」的縮寫,在此環境中會缺乏一些 systemcall,如
fork與brk/sbrk
- 以 RISC-V 的 virtual-memory system 來說,
- peripherals (週邊)
- PLIC
- 用來管理外部中斷,提供多核處理器的中斷控制功能
- CLINT/ACLINT
- 用來支持內部中斷,如 software interrupt 與 timer interrupt
- ACLINT 為 CLINT 的加強版,CLINT 不支援 supervisor-level 的 IPI
- PLIC
- VirtIO
- Disk
- network
- GPU
- 基本的 SBI 支援
- risc-v 架構上的 linux kernel 中透過 SBI 與底層溝通
- 若要使用 SMP,則需要有 HSM extension 支援
CPU emulator
要實現 CPU emulation 最基本的功能,我們只需要將會用到的暫存器,解碼的邏輯與指令執行的邏輯實作完成就好了,這邊以 semu 為例看一下簡單的 code,就可以理解到所謂的實作是怎麼一回事了
Register
在 riscv.h 中的 struct __hart_internal 定義了會用到的暫存器:
struct __hart_internal {
uint32_t x_regs[32];
/* LR reservation virtual address. last bit is 1 if valid */
uint32_t lr_reservation;
/* Assumed to contain an aligned address at all times */
uint32_t pc;
/* Address of last instruction that began execution */
uint32_t current_pc;
// ...
/* Supervisor state */
bool s_mode;
bool sstatus_spp; /**< state saved at trap */
bool sstatus_spie;
uint32_t sepc;
uint32_t scause;
uint32_t stval;
bool sstatus_mxr; /**< alter MMU access rules */
bool sstatus_sum;
bool sstatus_sie; /**< interrupt state */
uint32_t sie;
uint32_t sip;
uint32_t stvec_addr; /**< trap config */
bool stvec_vectored;
uint32_t sscratch; /**< misc */
uint32_t scounteren;
uint32_t satp; /**< MMU */
uint32_t *page_table;
// ...
};由於模擬器目前是實作在 S mode 下的,所以這邊還有 S mode 下模擬器會用到的暫存器
Instruction Fetch
#define PRIV(x) ((emu_state_t *) x->priv)
void vm_step(hart_t *vm)
{
// ...
uint32_t insn;
mmu_fetch(vm, vm->pc, &insn);
if (unlikely(vm->error))
return;
vm->pc += 4;
/* Assume no integer overflow */
vm->instret++;
// ...
}就是從 memory 中 PC 指向的位址提取出 insn_opcode
Decode
提取出 insn_opcode 後按照 Instruction Set 裡面給的表去做一一對應,你可以在 RISCV ISA MANUAL 中看到這張表
以 ADDI 為例,其指令格式長這樣:
| imm[11:0] | rs1 | funct3 | rd | opcode | I-type |
|---|---|---|---|---|---|
| imm[11:0] | rs1 | 000 | rd | 0010011 | ADDI |
因此在 riscv_private.h 中我們就可以看到 RV32_OP_IMM 的定義為 0b0010011:
/* base RISC-V ISA */
enum {
RV32_OP_IMM = 0b0010011,
RV32_OP = 0b0110011,
RV32_LUI = 0b0110111,
RV32_AUIPC = 0b0010111,
RV32_JAL = 0b1101111,
RV32_JALR = 0b1100111,
RV32_BRANCH = 0b1100011,
RV32_LOAD = 0b0000011,
RV32_STORE = 0b0100011,
RV32_MISC_MEM = 0b0001111,
RV32_SYSTEM = 0b1110011,
RV32_AMO = 0b0101111,
};而在 vm_step 中就會根據 opcode 的值選擇對應的格式:
#define PRIV(x) ((emu_state_t *) x->priv)
void vm_step(hart_t *vm)
{
// ...
uint32_t insn_opcode = insn & MASK(7), value;
switch (insn_opcode) {
case RV32_OP_IMM:
set_dest(vm, insn,
op_rv32i(insn, false, read_rs1(vm, insn), decode_i(insn)));
break;
case RV32_OP:
if (!(insn & (1 << 25)))
set_dest(
vm, insn,
op_rv32i(insn, true, read_rs1(vm, insn), read_rs2(vm, insn)));
else
set_dest(vm, insn,
op_mul(insn, read_rs1(vm, insn), read_rs2(vm, insn)));
break;
// ...
case RV32_SYSTEM:
op_system(vm, insn);
break;
default:
vm_set_exception(vm, RV_EXC_ILLEGAL_INSN, 0);
break;
}
}因為是以 ADDI 為例,所以這邊就會進到 RV32_OP_IMM 的部分,再其中會再以類似的方法將其餘的欄位,如 rd、rs1、imm 與 func3,給解析出來,得到確切的指令
Execute
在知道實際上要執行的是哪個指令後就可以直接於我們 host 端的平台上實作該指令的功能了,以 ADDI 來說其行為是將 rs1 加上 imm 的值寫入 rd,因此實作上直接利用 uint32_t 的加法就可以了:
#define NEG_BIT (insn & (1 << 30))
static uint32_t op_rv32i(uint32_t insn, bool is_reg, uint32_t a, uint32_t b)
{
/* TODO: Test ifunc7 zeros */
switch (decode_func3(insn)) {
case 0b000: /* IFUNC_ADD */
return a + ((is_reg && NEG_BIT) ? -b : b);
case 0b010: /* IFUNC_SLT */
return ((int32_t) a) < ((int32_t) b);
case 0b011: /* IFUNC_SLTU */
return a < b;
case 0b100: /* IFUNC_XOR */
return a ^ b;
case 0b110: /* IFUNC_OR */
return a | b;
case 0b111: /* IFUNC_AND */
return a & b;
case 0b001: /* IFUNC_SLL */
return a << (b & MASK(5));
case 0b101: /* IFUNC_SRL */
return NEG_BIT ? (uint32_t) (((int32_t) a) >> (b & MASK(5))) /* SRA */
: a >> (b & MASK(5)) /* SRL */;
}
__builtin_unreachable();
}
#undef NEG_BITADDI 的 func3 是 000,因此會計算 a + ((is_reg && NEG_BIT) ? -b : b); 並回傳,而在剛剛的 vm_step 中將其值作為參數傳入了 set_dest,其定義如下:
static inline void set_dest(hart_t *vm, uint32_t insn, uint32_t x)
{
uint8_t rd = decode_rd(insn);
if (rd)
vm->x_regs[rd] = x;
}可以看見這邊將計算的值寫入到了 rd,如此一來就完成了 ADDI 的執行
PLIC & ACLINT/CLINT
PLIC
對於 PLIC,詳見 RISC-V PLIC 與 spec
RISC-V 內將 Trap 分為 Exception 與 Interrupt,而 Interrupt 有三種,分別為 software interrupt、timer interrupt 與 external interrupt。 而 PLIC 全名為 Platform Level Interrupt Controller,是一個 memory mapped device,如上述所說的用來處理 external interrupt,也就是下圖左邊的部分:
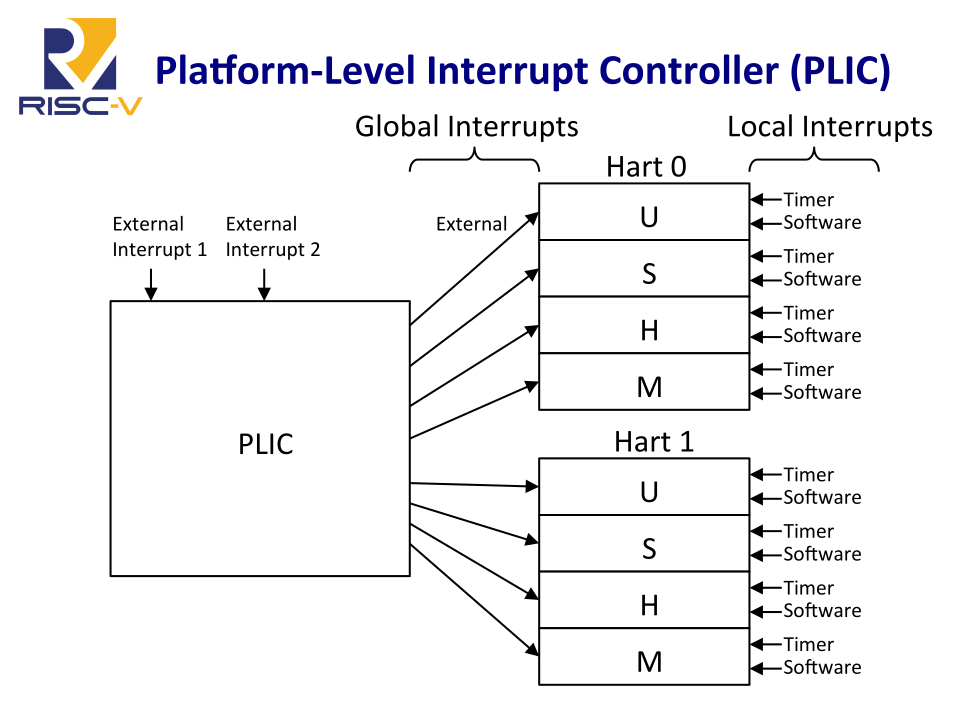
PLIC 內主要分為 PLIC Gateway 與 PLIC Core,當中斷源(Interrupt Source)發起中斷時,其訊號會到達 Gateway,Gateway 再根據規定將這個中斷轉發給 PLIC Core,而 PLIC Core 再根據規定,利用 multicasting 的方式尋找可以處理這個中斷的 hart
下圖是更具體的流程:
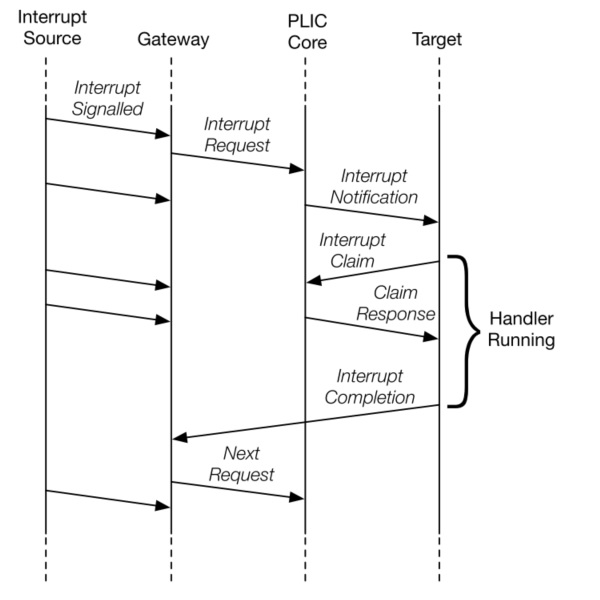
(Figure 2. PLIC Interrupt Flow)
步驟如下:
- 全域中斷從其來源發送到中斷閘道,該閘道負責處理每個來源的中斷信號
- 中斷閘道隨後向 PLIC 核心發送單一的中斷請求,這些請求會在核心的中斷掛起位元(interrupt pending bits, IP)中鎖存(latches)
- 如果目標有啟用掛起的中斷,且掛起中斷的優先級超過每個目標的閾值,則 PLIC 核心會將中斷通知轉發給一個或多個目標
- 當目標接收到外部中斷後,它會向 PLIC 核心發送中斷請求,以檢索針對該目標的最高優先級全域中斷來源的識別碼
- PLIC 核心隨後清除相應的中斷來源掛起位元(interrupt source pending bit)
- 在目標處理完該中斷後,會向相關的中斷閘道發送中斷完成消息
- 之後中斷閘道便可以再為相同的來源向 PLIC 轉發另一個中斷請求了
ACLINT
對於 ACLINT,詳見 RISC-V ACLINT 與 spec
ACLINT 是一「組」 memory mapped devices,用於在 multi-hart 的 RISC-V 平台上提供
- inter-processor interrupts (IPI)
- 定時器功能 (Timer functionalities)
內部分為有三個部分:
- MTIMER
- Machine-level
- 用以支持計時和產生 timer 中斷
- 內含一個
MTIME與多個MTIMECMP暫存器
- MSWI
- Machine-level
- 提供 Machine-level IPI 的功能
- 內含一至多個
MSIP暫存器,視連接的 HART 數量而定
- SSWI
- Supervisor-level
- 提供 Supervisor-level IPI 功能
- 內含一至多個
SETSSIP暫存器,視連接的 HART 數量而定
這三個為獨立的 interrupt controller,如果平台有替代機制,可以選擇性地省略部分 ACLINT 設備,可以看一下 QEMU 上的
device-tree config,你可以用以下命令生成 SMP = 4 情況下有 ACLINT 的 device-tree config:
qemu-system-riscv64 -machine virt,aclint=true -smp 4 -machine dumpdtb=qemu.dtb
dtc -I dtb -O dts -o qemu.dts qemu.dtb你會看到內部有這三個 interrupt controller:
sswi@2f00000 {
#interrupt-cells = <0x00>;
interrupt-controller;
interrupts-extended = <0x08 0x01 0x06 0x01 0x04 0x01 0x02 0x01>;
reg = <0x00 0x2f00000 0x00 0x4000>;
compatible = "riscv,aclint-sswi";
};
mtimer@2004000 {
interrupts-extended = <0x08 0x07 0x06 0x07 0x04 0x07 0x02 0x07>;
reg = <0x00 0x200bff8 0x00 0x4008 0x00 0x2004000 0x00 0x7ff8>;
compatible = "riscv,aclint-mtimer";
};
mswi@2000000 {
#interrupt-cells = <0x00>;
interrupt-controller;
interrupts-extended = <0x08 0x03 0x06 0x03 0x04 0x03 0x02 0x03>;
reg = <0x00 0x2000000 0x00 0x4000>;
compatible = "riscv,aclint-mswi";
};timer interrupt
MTIMER 負責 timer interrupt,其內部有兩個暫存器,MTIMECMP 負責存儲著目標時間值,而 MTIME 會持續遞增。 當 MTIME 的值大於等於 MTIMECMP 時,就會觸發 timer interrupt,中斷狀態會反映在每個 HART 的 mip 暫存器的 MTIP bit
IPI
若要觸發 IPI,只須往對應的 sip 暫存器寫入 1 就好,以 M mode 來說就是 MSIP,S mode 來說就是 SSIP
ACLINT/CLINT 與 PLIC 的差異
中斷種類
- PLIC 負責外部中斷,如 peripheral devices 與 I/O 設備的中斷
- ACLINT/CLINT 負責內部中斷,如 timer 與 IPI
- CLINT 僅支援 machine-mode
- ACLINT 多支援了 supervisor mode
數量
- PLIC 是所有 hart 共用一個的
- ACLINT/CLINT 是每個 hart 都各自有一個的
register
- CLINT 將 IPI 和 timer 功能的暫存器放在一個統一的地址空間中
- ACLINT 將 IPI 和 timer 功能分別定義為獨立的 memory mapped device
多核系統模擬
SBI
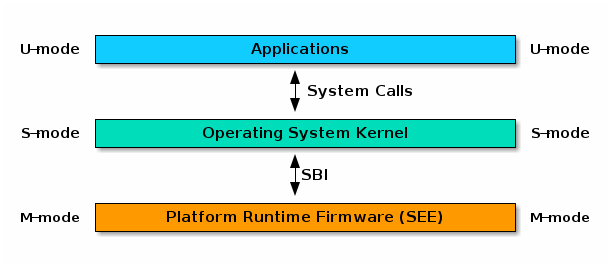
SBI 是 RISC-V 定義的一個位於 OS 和 Firmware 之間的介面,用來提供 OS 需要的功能的介面,像是上面提到的 IPI 與 timer interrupt 的設定。 SBI 的實作被稱為 SEE,因此模擬器會需要提供 SEE(實作 SBI),才有辦法在上面運行 linux kernel
這樣的設計上底下的 SEE 可以抽換成不同的實作,上層的 OS 也可以正常的運作,也因此 rv32emu 實作在 S mode 下,在 linux 中可以定義不同的 interrupt controller,實作在 S mode 就可以避免每更新 interrupt controller 就需要修改 linux guest 的情況
SBI HSM Extension
HSM 全名為 Hart State Management,定義了其一系列的 hart 狀態,並提供 S mode 下的軟體一系列用來改變 hart 狀態的函式介面
在 RISC-V Kernel Boot Requirements and Constraints 有提到在 SMP 系統上,有 2 種方法進入 linux kernel:
RISCV_BOOT_SPINWAIT
主要用於支援沒有 SBI HSM extension 和 M mode RISC-V kernel 的 older firmwares此方法會啟動所有 hart,並隨機選一個 hart 來執行 early boot code,其他 hart 則等待初始化完成
Ordered booting
僅會啟動一個 hart,執行 initialization phase,接著使用 SBI HSM extension 來啟動其他的所有 hart
在 Commit cfafe26 (link) 中引入了第二種方法:
RISC-V: Add supported for ordered booting method using HSM
Currently, all harts have to jump Linux in RISC-V. This complicates the multi-stage boot process as every transient stage also has to ensure all harts enter to that stage and jump to Linux afterwards. It also obstructs a clean Kexec implementation.
SBI HSM extension provides alternate solutions where only a single hart need to boot and enter Linux. The booting hart can bring up secondary harts one by one afterwards.
Add SBI HSM based cpu_ops that implements an ordered booting method in RISC-V. This change is also backward compatible with older firmware not implementing HSM extension. If a latest kernel is used with older firmware, it will continue to use the default spinning booting method.
這裡提到以前每個 hart 在啟動的過程中都必須直接引導到 Linux,這讓 multi-stage 的啟動變得很麻煩,因為每個中間的階段都必須要管理所有的 hart,確保他們正確的轉換到 Linux 中
而 SBI HSM extension 簡化了啟動過程,只需要一個 hart 即可開機並進入 Linux,主 hart 進入 Linux 後,可以依序啟動其他 hart
以下是 RISC-V SBI HSM Extension 管理 hart 的方式,從下圖片中可以看到 hart 在 HSM 的管理下會有以下七種狀態,分別為:
STARTED: hart 已物理上電並正常執行STOPPED: hart 不在 S mode 或更低特權模式下運行,如果底層平台具有物理斷電 hart 的機制,則它可以會被 SBI 實現斷電SUSPENDED: hart 處於低耗電狀態,如等待中斷或特定事件發生,發生時就會回到STARTED狀態STOP_PENDING、START_PENDING、SUSPEND_PENDING、RESUME_PENDING:代表正在進入下一個狀態,但由於 semu 是模擬器,因此這幾個狀態可以直接忽略,但在實際硬體運作上,作業系統會透過 sbi_hart_get_status 來取得 hart 的狀態,並根據取得的狀態做後續的動作
SBI IPI Extension
在 spec 裡面提到,當 hart 處於 SUSPENDED 的狀態,hart 會在收到中斷後切回 STARTED 模式,因此我們必須要有一個方式能夠讓 hart 之間能夠把對方叫起來,此時就要用到 IPI Extension 了
根據 IPI Extension 的定義,當有 hart 透過 IPI 這個 SBI 嘗試叫醒其他 hart 的話,就會對那個 hart 送出 supervisor software interrupt。 至於這個 supervisor software interrupt 要如何作到並沒有詳細定義,一般情況可以使用 ACLINT 或 CLINT 作到,在模擬器上也可以考慮不實作前述相關硬體,直接模擬軟體中斷即可
(
7.1 in riscv-sbi-doc) Send an inter-processor interrupt to all the harts defined in hart_mask. Interprocessor interrupts manifest at the receiving harts as the supervisor software interrupts.
SBI TIMER Extension
Linux kernel 會不斷設定 timer 來設定下一次的 timer 中斷來達到現代作業系統所需的一些功能,像是排程。 而 RISC-V SBI TIMER Extension 定義了上述所需的界面。 Linux kernel 會透過讀取 hart 上的暫存器 time 後根據 time 的數值呼叫 sbi_set_timer 設定下一次的 timer interrupt:
// https://elixir.bootlin.com/linux/v6.12.4/source/arch/riscv/kernel/sbi.c#L310
/**
* sbi_set_timer() - Program the timer for next timer event.
* @stime_value: The value after which next timer event should fire.
*
* Return: None.
*/
void sbi_set_timer(uint64_t stime_value)
{
__sbi_set_timer(stime_value);
}根據 TIMER Extension 的定義,我們所傳入的參數是一個 Absolute time,也就當 Timer 的時間超過所傳入的參數時,就會觸發 timer interrupt。而非呼叫 TIMER Extension 當下的 Timer 時間加上傳入的參數
(
5.1 in riscv-sbi-doc) Programs the clock for next event after stime_value time. stime_value is in absolute time. This function must clear the pending timer interrupt bit as well.
如何確認多核模擬器正確運作?
由於 linux 依賴於 HSM extension,因此我們可以在 Linux 中透過 /proc/cpuinfo 來驗證多核是否正確運作及 HSM 的實作是否正確,並可利用 /proc/interrupts 檢查 timer interrupt 的運作,還有透過查看 /proc/device-tree 來確認 ACLINT 是否有被正確識別:
## cat /proc/cpuinfo
processor : 0
hart : 0
isa : rv32ima
mmu : sv32
mvendorid : 0x12345678
marchid : 0x80000001
mimpid : 0x1
processor : 1
hart : 1
isa : rv32ima
mmu : sv32
mvendorid : 0x12345678
marchid : 0x80000001
mimpid : 0x1
processor : 2
hart : 2
isa : rv32ima
mmu : sv32
mvendorid : 0x12345678
marchid : 0x80000001
mimpid : 0x1
processor : 3
hart : 3
isa : rv32ima
mmu : sv32
mvendorid : 0x12345678
marchid : 0x80000001
mimpid : 0x1
## cat /proc/interrupts
CPU0 CPU1 CPU2 CPU3
1: 81 0 0 0 SiFive PLIC 1 Edge ttyS0
2: 1 0 0 0 SiFive PLIC 3 Edge virtio1
3: 0 0 0 0 SiFive PLIC 2 Edge virtio0
5: 3738 3735 3734 3731 RISC-V INTC 5 Edge riscv-timer
IPI0: 20 18 11 8 Rescheduling interrupts
IPI1: 178 634 40 609 Function call interrupts
IPI2: 0 0 0 0 CPU stop interrupts
IPI3: 0 0 0 0 CPU stop (for crash dump) interrupts
IPI4: 0 0 0 0 IRQ work interrupts
IPI5: 0 0 0 0 Timer broadcast interrupts
## ls /proc/device-tree/soc@F0000000/
#address-cells mswi@4400000 sswi@4500000
#size-cells mtimer@4300000 virtio@4100000
compatible name virtio@4200000
interrupt-controller@0 ranges
interrupt-parent serial@4000000