
OSTEP 32:Concurrency Bugs
OSTEP 32:Concurrency Bugs
研究人員多年來投入大量時間與精力研究並行錯誤。 早期研究多聚焦於 deadlock,我們在前章已稍作提及,接下來將深入探討這些主題 [C+71]。 近年則著重於其他常見並行錯誤(即非 deadlock 的錯誤)的研究。 本章將簡要檢視真實程式碼庫中出現的一些並行問題範例,以更清楚了解應注意哪些問題。 因此,本章的核心議題為:
Info
如何處理常見的並行錯誤?
並行錯誤通常呈現多種常見模式。 瞭解應警惕哪些模式,是撰寫更穩健且正確並行程式的第一步
32.1 What Types Of Bugs Exist?
首要且最顯而易見的問題是:在複雜的並行程式中,會出現哪些類型的並行錯誤? 這個問題一般而言很難回答,但幸好已有他人為我們做了研究。 我們特別參考 Lu 等人 [L+08] 的研究,他們深入分析多個流行的並行應用程式,以瞭解實際情況中會出現哪些錯誤
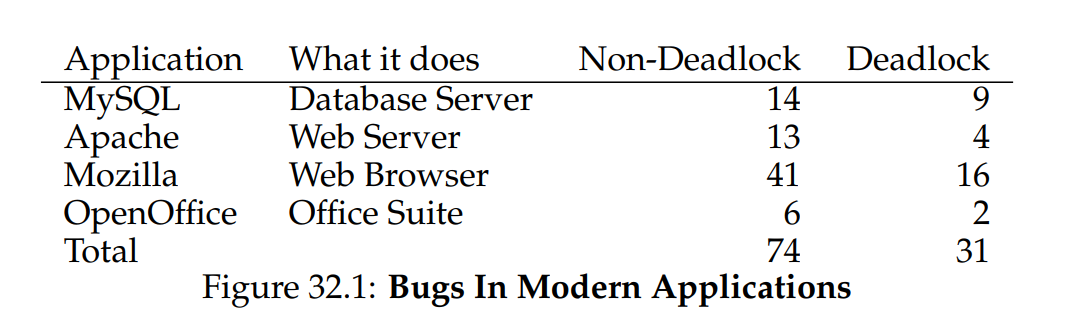
該研究聚焦於四個重要的開源應用程式:MySQL(流行的資料庫管理系統)、Apache(知名的網頁伺服器)、Mozilla(著名的瀏覽器)與 OpenOffice(免費的 Office 套件)。 在研究中,作者檢視了這些程式碼庫中已發現並修復的並行錯誤,並將開發人員的工作轉化為一個量化的錯誤分析; 理解這些結果能幫助你掌握成熟程式碼庫中實際會遇到的問題類型
圖 32.1 彙整了 Lu 等人研究的錯誤統計。 從圖中可見,總共分析了 105 個錯誤,其中大多數(74 個)並非 deadlock,剩下 31 個為 deadlock 錯誤。 此外,圖中還顯示了各應用程式中錯誤的數量; OpenOffice 僅有 8 件並行錯誤,而 Mozilla 則接近 60 件
接下來,我們將更深入探討這兩類錯誤(非 deadlock 與 deadlock)。 對於第一類非 deadlock 錯誤,我們將使用該研究中的實例來展開討論; 至於第二類 deadlock 錯誤,則會介紹過去為預防、避免或處理 deadlock 所做的大量工作
32.2 Non-Deadlock Bugs
根據 Lu 的研究,非 deadlock 錯誤佔了並行錯誤的大多數。 但這些錯誤屬於哪些類型? 它們如何產生? 又該如何修復? 現在我們來探討 Lu 等人發現的兩大類非 deadlock 錯誤:atomicity violation bugs 以及 order violation bugs
Atomicity-Violation Bugs
第一類錯誤稱為 atomicity violation(原子性違反)。 以下是一個在 MySQL 中出現的簡單範例。 在閱讀解說前,你可以先嘗試找出程式中的缺陷
(Figure 32.2: Atomicity Violation (atomicity.c))
// Thread 1:
if (thd->proc_info) {
fputs(thd->proc_info, ...);
}
// Thread 2:
thd->proc_info = NULL;在此範例中,兩個不同的執行緒會存取結構 thd 的 proc_info 欄位。 第一個執行緒檢查該值是不是 non-NULL 的,然後印出它; 第二個執行緒則會將它設成 NULL。 顯然,如果第一個執行緒在呼叫 fputs() 前完成檢查卻遭中斷,第二個執行緒就可能會在中途將指標設為 NULL; 等第一個執行緒恢復執行時,fputs() 便會對 NULL 指標 dereference 並導致當機
根據 Lu 等人的正式定義,atomicity violation 指的是「多次記憶體存取間預期的可序列化性被破壞(即某段程式區域原本應該是原子性執行的,但在實際執行時並未強制維護原子性)」。 在上述例子中,程式對於 proc_info 的非 NULL 檢查和緊接著在 fputs() 中使用該值,存在原子性假設; 當此假設不成立時,程式就無法正常運作
針對此類問題提出修正通常(但不總是)相對簡單。 你能想出如何修復上面的程式碼嗎?
在此解法(圖 32.3)中,我們只要在共用變數存取處加入鎖,確保每次執行緒要操作 proc_info 欄位時,都先取得 proc_info_lock。 當然,程式中其他所有存取該結構的程式碼,也都應該先取得此鎖才行
(Figure 32.3: Atomicity Violation Fixed (atomicity fixed.c))
pthread_mutex_t proc_info_lock = PTHREAD_MUTEX_INITIALIZER;
// Thread 1:
pthread_mutex_lock(&proc_info_lock);
if (thd->proc_info) {
fputs(thd->proc_info, ...);
}
pthread_mutex_unlock(&proc_info_lock);
// Thread 2:
pthread_mutex_lock(&proc_info_lock);
thd->proc_info = NULL;
pthread_mutex_unlock(&proc_info_lock);Order-Violation Bugs
另一種 Lu 等人發現的非 deadlock 錯誤稱為 order violation(順序違反)。 以下是一個簡單範例,同樣地,先試著看出程式在哪裡出了問題
(Figure 32.4: Ordering Bug (ordering.c))
// Thread 1:
void init()
{
mThread = PR_CreateThread(mMain, ...);
}
// Thread 2:
void mMain(...)
{
mState = mThread->State;
}如你所料,Thread 2 中的程式似乎假設變數 mThread 已經完成了初始化(且非 NULL); 但如果 Thread 2 在被建立後立即執行,mMain() 存取 mThread 時該值尚未被設定,就會因對 NULL 指標 dereference 而當機。 請注意,我們假設 mThread 的初始值為 NULL; 若非如此,Thread 2 dereference 任意記憶體位置時甚至會發生更怪異的錯誤
根據 Lu 等人的正式定義,order violation 指的是「兩個(或多組)記憶體存取之間的預期順序被顛倒(即 A 應始終在 B 之前執行,但在實際執行時並未強制維護此順序)」[L+08]
此類錯誤的修正通常是強制維護順序。 如前所述,使用 condition variables 是向現代程式庫中加入此類同步的簡單且可靠方式。 在上述範例中,我們可將程式重寫為圖 32.5 所示
(Figure 32.5: Fixing The Ordering Violation (ordering fixed.c))
pthread_mutex_t mtLock = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t mtCond = PTHREAD_COND_INITIALIZER;
int mtInit = 0;
// Thread 1:
void init()
{
...
mThread = PR_CreateThread(mMain, ...);
// signal that the thread has been created...
pthread_mutex_lock(&mtLock);
mtInit = 1;
pthread_cond_signal(&mtCond);
pthread_mutex_unlock(&mtLock);
...
}
// Thread 2:
void mMain(...)
{
...
// wait for the thread to be initialized...
pthread_mutex_lock(&mtLock);
while (mtInit == 0)
pthread_cond_wait(&mtCond, &mtLock);
pthread_mutex_unlock(&mtLock);
mState = mThread->State;
...
}在此修正後的程式中,我們加入了一個 condition variable(mtCond)及其對應的鎖(mtLock),還有一個用以追蹤狀態的變數 mtInit。 當初始化程式執行時,它會將 mtInit 設為 1,並對 mtCond 發出 signal。 若 Thread 2 在此之前已經執行,它會在等待該 signal 及狀態變更; 若在此之後執行,則會檢查 mtInit 並發現初始化已完成(mtInit 為 1),便繼續執行。 請注意,為了簡化,我們並未使用 mThread 本身作為狀態變數。 當執行緒之間的執行順序至關重要時,condition variables(或 semaphores)就能派上用場
Non-Deadlock Bugs: Summary
在 Lu 等人研究的非 deadlock 錯誤中,有相當大比例(97%)屬於 atomicity violation 或 order violation。 因此,程式設計師若能針對這兩類錯誤模式進行深入思考,便能更有效地避免它們。 此外,隨著自動化程式檢查工具的發展,開發者應優先針對這兩種錯誤進行檢測,因為它們佔部署中非 deadlock 錯誤的大多數
遺憾的是,並非所有錯誤都像上述範例般易於修復。 有些錯誤需要更深入地理解程式運作原理,或進行較大範圍的程式碼或資料結構重構才能解決。 欲知詳情,請參閱 Lu 等人那篇內容精彩且易讀的論文
32.3 Deadlock Bugs
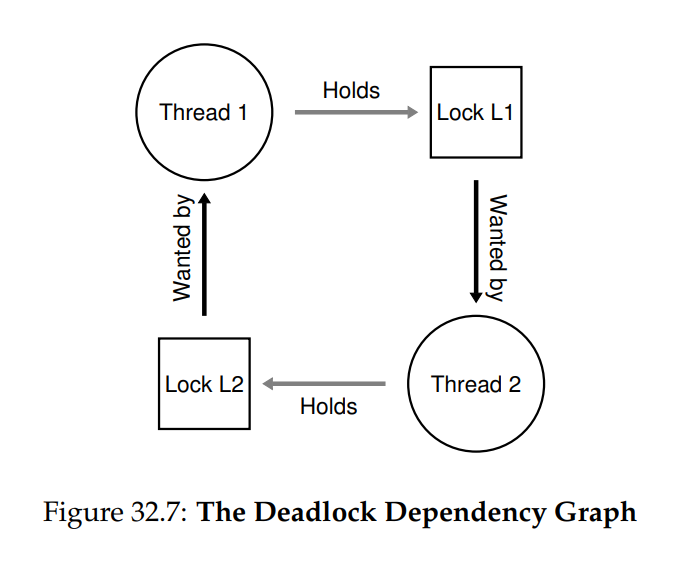
除了前述的並行錯誤外,另一個在具有複雜的鎖協定的並行系統中經常出現的經典問題稱為 deadlock。 deadlock 的典型情況是:執行緒(例如 Thread 1)持有鎖 L1 並等待鎖 L2; 不巧的是,持有鎖 L2 的執行緒(Thread 2)正在等待 L1 被釋放。 以下程式片段展示了可能導致 deadlock 的情境:
(Figure 32.6: Simple Deadlock (deadlock.c))
Thread 1: Thread 2:
pthread_mutex_lock(L1); pthread_mutex_lock(L2);
pthread_mutex_lock(L2); pthread_mutex_lock(L1);請注意,程式執行時不一定會發生 deadlock; 但若 Thread 1 先取得鎖 L1,接著切換到 Thread 2 執行,Thread 2 再取得 L2 並嘗試取得 L1,便會陷入 deadlock,因為兩者互相等待而無法繼續執行。 圖 32.7 以圖形方式示意此情況:圖中出現的環路即代表 deadlock。 上述說明應該足以讓問題變得清晰。 那麼,程式設計師應如何撰寫程式,才能以某種方式處理 deadlock 呢?
Info
如何處理 deadlock?
我們應如何設計系統來預防、避免,或至少偵測並恢復 deadlock? 這在現今的系統中是否真是個問題?
Why Do Deadlocks Occur?
如你所想,上述這類簡單 deadlock 看似很容易避免。 例如,只要 Thread 1 和 2 保持相同的鎖取得順序,就不會發生 deadlock。 那麼,為什麼 deadlock 還是會出現?
其中一個原因是,在大型程式碼庫中,各組件間會產生複雜的相依關係。 以作業系統為例:虛擬記憶體系統可能需要存取檔案系統,將硬碟區塊換入; 而檔案系統又可能需要一頁記憶體來讀取該區塊,進而聯絡虛擬記憶體系統。 因此,在大型系統中設計鎖策略時,必須謹慎考量,以避免程式中自然形成的循環相依導致 deadlock
另一個原因源自封裝(encapsulation)的本質。 作為軟體開發者,我們被教導要隱藏實作細節,以便以模組化方式建構軟體。 可惜,這種模組化與鎖的機制並不相容。 如 Jula 等人所述 [J+08],某些看似無害的介面幾乎會誘發 deadlock。 例如,Java 中的 Vector 類別及其 AddAll() method,使用方式如下:
Vector v1, v2;
v1.AddAll(v2);在內部,為了讓此 method 具備多執行緒安全性,必須同時取得目標 vector(v1)與參數 vector(v2)的鎖。 這個 routine 會以某種任意順序(例如先 v1 再 v2)取得鎖,然後將 v2 的內容加入 v1。 若另一個執行緒幾乎同時呼叫 v2.AddAll(v1),便可能發生 deadlock,而這一切對呼叫端來說幾乎毫無察覺
Conditions for Deadlock
Deadlock 的發生需要以下四個條件同時成立:
- Mutual exclusion:執行緒對其所需的資源(如鎖)擁有排他控制
- Hold-and-wait:執行緒一邊持有已分配給它的資源(如已取得的鎖),一邊等待額外的資源(如想要再取得的鎖)
- No preemption:資源(如鎖)無法被強制從正使用它們的執行緒上移除
- Circular wait:存在一個執行緒環路,每個執行緒都持有下一個執行緒所需要的資源(如鎖)
若以上任一條件不成立,deadlock 就無法發生。 因此,我們首先探討預防 deadlock 的技術; 每種策略都旨在阻止上述某個條件出現,從而作為處理 deadlock 的方法之一
Prevention
Circular Wait
最實用的預防技巧(也是最常被採用的)莫過於在編寫有鎖的程式碼時,保證永不產生 circular wait。 最直接的方法就是對鎖的取得建立 total ordering。 舉例來說,若系統中只有兩把鎖(L1 和 L2),只要永遠先取得 L1 再取得 L2,就能避免 deadlock。 如此嚴格的順序能確保不會出現循環等待,因此不會 deadlock
當然,在更複雜的系統中,鎖的數量往往超過兩把,因此要實現 total lock ordering 可能相當困難(甚至不必要)。 此時,partial ordering 就能作為避免 deadlock 的鎖排序問題的策略派上用場。 Linux 的記憶體映射程式碼中 [T+94](v5.2)有一個真實且出色的 partial lock ordering 範例,原始碼最上方註解列出十組不同的鎖取得順序,包括像 「i_mutex before i_mmap_rwsem」 這類簡單順序,以及 「i_mmap_rwsem before private_lock before swap_lock before i_pages_lock」 這類複雜順序
如你所見,不論是 total 還是 partial ordering,都需要謹慎設計鎖策略並小心實作。 此外,ordering 只是約定俗成的規範,若程式設計師疏忽,仍可能違反協定而引發 deadlock。 最後,鎖的排序還需要對程式庫及各種 routine 的呼叫流程有深入了解,哪怕一處失誤,就可能遇到 deadlock
Info
透過鎖的位址強制執行鎖排序
在某些情況下,函數必須同時取得兩把(或更多)鎖,因此我們必須小心,否則可能發生 deadlock。想像一個函數以此方式呼叫:
do_something(mutex_t *m1, mutex_t *m2);若程式總是先鎖 m1 再鎖 m2(或總是先鎖 m2 再鎖 m1),就可能發生 deadlock,因為一個執行緒可能呼叫 do_something(L1, L2),而另一個執行緒呼叫 do_something(L2, L1)
為避免此問題,聰明的程式設計師可利用鎖的位址作為取鎖的排序依據。 只要按照鎖位址的 high-to-low 或 low-to-high 順序取得鎖,do_something() 就能保證鎖的取得順序一致,不受參數傳入順序影響。程式碼示例如下:
if (m1 > m2) { // grab in high-to-low address order
pthread_mutex_lock(m1);
pthread_mutex_lock(m2);
}
else {
pthread_mutex_lock(m2);
pthread_mutex_lock(m1);
}
// Code assumes that m1 != m2 (not the same lock)透過這個簡單技巧,程式設計師就能實現簡潔且高效的多鎖取得,並避免 deadlock
Hold-and-wait
要避免 deadlock 的 hold-and-wait 條件,可透過一次性(原子性地)取得所有鎖來實現。 實務上,可參考如下做法:
pthread_mutex_lock(prevention); // begin acquisition
pthread_mutex_lock(L1);
pthread_mutex_lock(L2);
...
pthread_mutex_unlock(prevention); // end此程式碼先取得全域鎖 prevention,確保在鎖取得過程中不會發生意外的執行緒切換,從而再次避免 deadlock。 當然,這要求任何執行緒每次要取得任何鎖時,都必須先取得 prevention 這把全域鎖。 舉例來說,就算另一個執行緒以不同順序嘗試取得 L1 與 L2,也不會有 deadlock,因為它執行時同樣會先持有 prevention 這把鎖
請注意,這種解法存在多項問題。 首先,如同先前所述,封裝性(encapsulation)反而成為阻礙:在呼叫的 routine 中,我們必須事先知道並取得所有必要的鎖。 其次,此技術會降低並行度,因為所有鎖都必須一開始就同時取得,而非在真正需要時再動態獲取
No Preemption
由於我們通常認為鎖會一直持有到呼叫 unlock 為止,需要取得多把鎖的狀況常常會出問題,因為你在等待一把鎖時可能手上已經持有另一把鎖了,導致互相等待。 許多執行緒函式庫提供更彈性的介面來避免這種情況,具體而言,pthread_mutex_trylock() 函式要麼在鎖可用時取得鎖並返回成功,要麼返回錯誤碼表示該鎖已被持有; 在後者情況下,你可以稍後再試一次以取得該鎖
這類介面可用於構建一種既無 deadlock,順序性容錯又很高的取鎖協定,如下所示:
top:
pthread_mutex_lock(L1);
if (pthread_mutex_trylock(L2) != 0) {
pthread_mutex_unlock(L1);
goto top;
}請注意,另一個執行緒也可以遵循相同協定,但以相反地順序取得鎖(先 L2 再 L1),程式依然不會 deadlock。 不過這會產生一個新問題:livelock。 有可能(雖然或許不太常見)兩個執行緒反覆執行這段程式,卻都無法同時取得兩把鎖。 在此情況下,兩者不斷重複跑這段程式(因此這不是 deadlock),卻也沒有任何進展,因而稱為 livelock。 livelock 也有解決的方法:例如在每次重試前加入隨機延遲,以降低競爭執行緒之間的連續干擾機率
不過,這種解法有一點需要注意:它無視了 trylock 方法的難點。 第一個可能出現的問題仍然源自封裝性:若其中一把鎖藏在某個被呼叫的 routine 裡,實作時要在失敗後跳回開頭的難度就更為複雜了(roll back 難度較高)。 若程式在此過程中已取得其他資源(非 L1),它必須在無法取得 L2 時,同步釋放那些資源; 例如,若在取得 L1 後配置了記憶體,就必須在重試前先釋放該記憶體。 不過,在某些受限情境下(如前述的 Java Vector 方法),此做法仍能帶來好處並順利運作
你或許也會注意到,此方法並未真正引入 preemption(強制從持有鎖的執行緒手中奪取鎖),而是透過 trylock 機制,讓開發者能優雅地放棄自己對鎖的持有(即自行 preempt)。 儘管在這方面並不完美,但它確實具有實用性
Mutual Exclusion
最後一種預防技巧是徹底避免 mutual exclusion 的需求。 一般而言,我們知道這很困難,因為待執行的程式確實包含 critical section。 那麼,我們該怎麼做?
Herlihy 提出可以在完全不使用鎖的情況下設計各種資料結構 [H91, H93]。 這些 lock-free(及相關的 wait-free)方法的核心思想很簡單:利用強大的硬體指令,以不需顯式加鎖的方式構建資料結構
舉個簡單例子,假設我們有一條 compare-and-swap 指令,你或許還記得它是由硬體提供的原子性指令,其行為如下:
int CompareAndSwap(int *address, int expected, int new) {
if (*address == expected) {
*address = new;
return 1; // success
}
return 0; // failure
}假設我們想利用 compare-and-swap 原子性地將某個值增加指定量,就可以寫出下列簡易函式:
void AtomicIncrement(int *value, int amount) {
do {
int old = *value;
} while (CompareAndSwap(value, old, old + amount) == 0);
}我們並非先加鎖再更新後解鎖,而是反覆嘗試用 compare-and-swap 將值更新到新數值。 如此一來,不需要取得任何鎖,也不會產生 deadlock(不過 livelock 仍有可能發生,因此實際可用的解法會比上述簡單程式更複雜)
接著看一個稍微複雜的例子:list 的插入。 以下程式片段示範在 list head 插入節點:
void insert(int value) {
node_t *n = malloc(sizeof(node_t));
assert(n != NULL);
n->value = value;
n->next = head;
head = n;
}這段程式完成簡單的插入,但若有多個執行緒「同時」呼叫,就會出現 race condition。 你能說出原因嗎?(想像兩個插入操作同時執行,並以最不利的排程交錯,串列會變成什麼樣子)。 當然,我們可以透過在程式周圍加上取鎖和解鎖來解決:
void insert(int value) {
node_t *n = malloc(sizeof(node_t));
assert(n != NULL);
n->value = value;
pthread_mutex_lock(listlock); // begin critical section
n->next = head;
head = n;
pthread_mutex_unlock(listlock); // end critical section
}在此解法中,我們採用了傳統的加鎖方式。 下面改成 lock-free 實作,僅使用 compare-and-swap 指令。 其中一種寫法如下:
void insert(int value) {
node_t *n = malloc(sizeof(node_t));
assert(n != NULL);
n->value = value;
do {
n->next = head;
} while (CompareAndSwap(&head, n->next, n) == 0);
}此程式先將新節點的 next 指向當前 head,然後嘗試以 compare-and-swap 將 head 換成新節點。 若此間有其他執行緒已成功換入新 head,則 compare-and-swap 會失敗,本執行緒便重試並帶入新的 head。 當然,要構建實用的串列不僅是單純插入節點; 毫不意外地,要完成能夠插入、刪除與查詢的 lock-free list 並非易事。 如欲深入了解,請參閱豐富的 lock-free 和 wait-free 同步文獻 [H01, H91, H93]
Info
精明的讀者或許會好奇,為什麼我們要延遲到插入操作到快完成時才取鎖,而不是一進入 insert() 就上鎖? 你能分析出這樣做為何合理嗎? 例如,程式對 malloc() 有哪些前提假設?
- 首先,
malloc()只處理私有記憶體分配,不會接觸共享資料結構,因此可在不持有鎖的情況下安全呼叫 - 其次,插入節點的 value 與 next 欄位都是新配置、未公開給其他執行緒的記憶體,也不需要鎖保護
- 最後,上鎖時間只要涵蓋對 head 與 next 指標的修改即可,這最小化了 critical section 的範圍,提高並行的效能
Deadlock Avoidance via Scheduling
在某些情境下,我們寧可採用 deadlock avoidance 而非 prevention。 avoidance 需要對各執行緒在執行期間可能取得的鎖有全域性的了解,並以此資訊排程,確保永不發生 deadlock
舉例來說,假設有兩個處理器和四個執行緒必須在其上排程;且我們知道 T1 在執行期間會取得 L1 與 L2(任意順序)、T2 同樣取得 L1 與 L2、T3 只取得 L2、T4 則不會取得任何鎖。 我們可將這些鎖需求以表格呈現:
| T1 | T2 | T3 | T4 | |
|---|---|---|---|---|
| L1 | yes | yes | no | no |
| L2 | yes | yes | yes | no |
聰明的排程器便可計算:只要 T1 和 T2 永不同時執行,就不會有 deadlock。 下列即為一種可行排程:
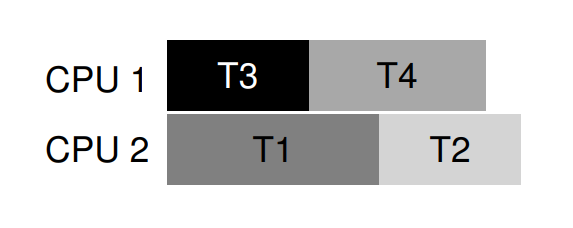
請注意,(T3 與 T1) 或(T3 與 T2) 同時執行是沒問題的。 儘管 T3 會取得 L2,但它僅持有一把鎖,無法與其他執行緒並行時引發 deadlock
再來看另一個例子。 在此例中,對相同資源(即 L1 與 L2)的競爭更激烈,其鎖需求表如下:
| T1 | T2 | T3 | T4 | |
|---|---|---|---|---|
| L1 | yes | yes | yes | no |
| L2 | yes | yes | yes | no |
具體而言,T1、T2、T3 都會在執行期間取得 L1 與 L2。 下方是一種可保證永不 deadlock 的排程:
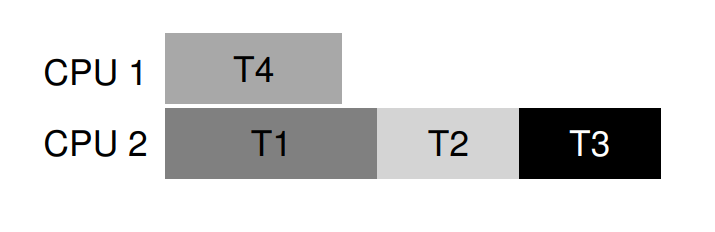
如你所見,靜態排程採取保守策略,將 T1、T2、T3 全部分配到同一處理器,導致整體執行時間大幅增加。 雖然可以考慮同時執行這些工作,但因為怕 deadlock,所以不敢,代價便是效能下降
這類方法的著名範例是 Dijkstra 的 Banker’s Algorithm [D64],文獻中也有許多類似作法。 遺憾的是,它們僅適用於非常受限的環境,例如嵌入式系統,在那裡我們能完全掌握所有待執行任務及其鎖需求; 更何況,這種方式如前例所示,也會限制並行度。 因此,透過排程避免 deadlock 並非通用的常用解法
Info
不必事事完美(Tom West’s Law)
Tom West 以《Soul of a New Machine》[K81] 一書主角身分知名,他的名言是:「Not everything worth doing is worth doing well」,這是一句絕佳的工程格言。 若某件壞事極罕發生,且其後果輕微,就沒必要花大把心力去預防; 但若你在打造太空梭,一旦出了錯就可能爆炸,那麼也許就該無視這句忠告
有讀者可能會抗議:「這聽起來像是在提倡平庸!」或許他們有道理,我們也應謹慎對待此類建議。 不過,根據經驗,在工程領域面對緊迫時程與各種現實問題時,總得取捨哪些部分要高品質完成、哪些可留待日後。 困難之處就在於知道何時該做何種取捨,這只有透過經驗與對手上任務的投入才能獲得
Detect and Recover
最後一種常見策略是允許 deadlock 偶爾發生,然後在偵測到 deadlock 後採取對應措施。 例如,如果作業系統一年才凍結一次,你只需重新啟動即可繼續工作。 若 deadlock 非常少見,這樣的「非解決方案」其實相當務實
許多資料庫系統都採用 deadlock 偵測與復原技術。 系統會定期執行 deadlock 偵測器,建構資源圖並檢查其中是否有環路。 若發現環路(deadlock),便需重新啟動系統; 若先前需要更複雜的資料結構修復,則可能由人工介入協助
欲進一步了解資料庫並行性、deadlock 及相關議題,請參考其他文獻 [B+87, K87]。 閱讀這些著作,或者更進一步,修習資料庫課程以深入探究這個豐富且有趣的領域
32.4 Summary
在本章中,我們探討了並行程式中會出現的錯誤類型。 第一類為非 deadlock 錯誤,出乎意料地相當常見,但修復起來通常比較容易。 這類錯誤包括 atomicity violation —— 原本應一起執行的指令序列未能維持原子性,以及 order violation —— 兩個執行緒之間的必要順序未被強制維護
我們也簡要討論了 deadlock:它為何發生,以及可採取的對策。 deadlock 問題與並行本身一樣古老,相關論文不計其數。 實務上最佳做法是謹慎行事,制定明確的鎖取得順序,從根本上預防 deadlock。 wait-free 方法也具潛力,因為部分 wait-free 資料結構已經進入常用函式庫和關鍵系統(如 Linux)
然而,這些方法因缺乏通用性且開發新型 wait-free 資料結構複雜,使用範圍可能受限。 或許最理想的解法是發展新的並行程式設計模式:如 Google 的 MapReduce [GD02],程式設計師可以在完全不使用鎖的情況下描述某些平行計算。 由於鎖的本質上存在問題,我們應儘可能避免使用它們,除非萬不得已
References
[B+87] “Concurrency Control and Recovery in Database Systems” by Philip A. Bernstein, Vassos Hadzilacos, Nathan Goodman. Addison-Wesley, 1987.
資料庫管理系統中並行控制與復原的經典著作,對資料庫領域的並行、deadlock 與相關議題有深入探討[C+71] “System Deadlocks” by E.G. Coffman, M.J. Elphick, A. Shoshani. ACM Computing Surveys 3(2), June 1971.
首度系統化闡述 deadlock 發生條件及處理方法的經典論文,後續研究紛紛引用[D64] “Een algorithme ter voorkoming van de dodelijke omarming” by Edsger Dijkstra. 1964.
Dijkstra 最早指出並解決「致命擁抱」(deadly embrace,也即 deadlock)問題的論文[GD02] “MapReduce: Simplified Data Processing on Large Clusters” by Sanjay Ghemawat, Jeff Dean. OSDI ’04, October 2004.
開創大規模叢集資料處理時代的 MapReduce 架構論文,提出無需鎖即可完成平行計算的思路[H01] “A Pragmatic Implementation of Non-blocking Linked-lists” by Tim Harris. DISC 2001.
較現代的 lock-free 鏈結串列實作範例,展示不使用鎖的複雜性與挑戰[H91] “Wait-free Synchronization” by Maurice Herlihy. ACM TOPLAS 13(1), January 1991.
開創 wait-free 同步方法的先驅性論文,提出無鎖且保證有限步驟完成的同步設計[H93] “A Methodology for Implementing Highly Concurrent Data Objects” by Maurice Herlihy. ACM TOPLAS 15(5), November 1993.
系統性介紹 lock-free 與 wait-free 資料結構的論文,分別探討兩者的優劣與實作要點[J+08] “Deadlock Immunity: Enabling Systems To Defend Against Deadlocks” by Horatiu Jula, Daniel Tralamazza, Cristian Zamfir, George Candea. OSDI ’08, December 2008.
針對系統層面 deadlock 防禦提出創新思路的最新論文,示範如何免於重複陷入相同的 deadlock[K81] “Soul of a New Machine” by Tracy Kidder. Backbay Books, 2000 (reprint of 1980).
經典系統開發紀實,描述 Data General 團隊打造新機的點滴,是系統工程師必讀之作[K87] “Deadlock Detection in Distributed Databases” by Edgar Knapp. ACM Computing Surveys 19(4), December 1987.
分散式資料庫中 deadlock 偵測與復原技術的綜覽論文,並指引相關研究方向[L+08] “Learning from Mistakes—A Comprehensive Study on Real World Concurrency Bug Characteristics” by Shan Lu, Soyeon Park, Eunsoo Seo, Yuanyuan Zhou. ASPLOS ’08, March 2008.
首篇深入研究真實軟體中並行錯誤特性的論文,揭示非 deadlock 錯誤類型並驅動本章討論[T+94] “Linux File Memory Map Code” by Linus Torvalds et al. v5.2 source: mm/filemap.c.
Linux 記憶體對映程式碼中的 partial lock ordering 範例,展示實務中鎖策略的複雜性