
OSTEP 26:Concurrency and Threads
OSTEP 26:Concurrency and Threads
到目前為止,我們已經了解作業系統所提供的基本抽象層的演進。 我們看過如何把單一實體 CPU 轉變成多個虛擬 CPU,從而營造出多個程式同時執行的錯覺。 我們也了解如何為每個 process 建立一個龐大且私有的 virtual memory 的假象; 這個 address space 的抽象層讓每個程式都能表現得彷彿擁有自己的記憶體,但實際上 OS 正在背地裡把多個 address space multiplex 到同一份 physical memory(有時甚至 multiplex 到 disk)
在本章中,我們會為單一執行中的 process 引入一個新的抽象層:thread。 傳統上,我們認為程序裡只有一個執行點(也就是只有一個 PC 負責抓取並執行指令),而一個 multi-threaded 程式則擁有不只一個執行點(也就是多個 PC,各自抓取並執行指令)。 或者換個說法,你可以把每個 thread 想成一個獨立的 process,唯一的差別是它們共享同一個 address space,因此可以存取相同的資料
因此,單一 thread 的 state 與 process 的 state 非常相似。 它擁有一個 program counter(PC)用來追蹤程式正從哪裡抓取指令。 每個 thread 也都有自己私有的一組用來運算的暫存器; 因此,如果兩個 threads 在同一顆處理器上執行,當系統從執行 T1 切換到執行 T2 時,就必須執行 context switch。 thread 之間的 context switch 與 process 之間的 context switch 十分相像,因為必須先把 T1 的 register state 儲存起來,再將 T2 的 register state 回復,然後才能執行 T2
對於 processes,我們把 state 儲存在 process control block(PCB)中; 現在,我們需要一個或多個 thread control block(TCB)來儲存同一個 process 內所有 threads 的 state。 不過,thread 間的 context switch 與 process 間的 context switch 有一個主要差異:address space 相同(也就是不需要更換我們正在使用的 page table)
另一個 thread 與 process 之間的重要差異與 stack 有關。 在我們對經典 process(現在可以稱為 single-threaded process)address space 的簡化模型中,其只存在一個 stack,通常位於 address space 的最底端(見圖 26.1 左側)
然而,在 multi-threaded process 中,每個 thread 會獨立執行,當然也可能呼叫各種函式來完成手上的工作。 因此 address space 不再只有一個 stack,而是每個 thread 各有一個 stack。 假設一個 multi-threaded process 內含兩個 threads,其 address space 佈局就會變得不一樣(見圖 26.1 右側)
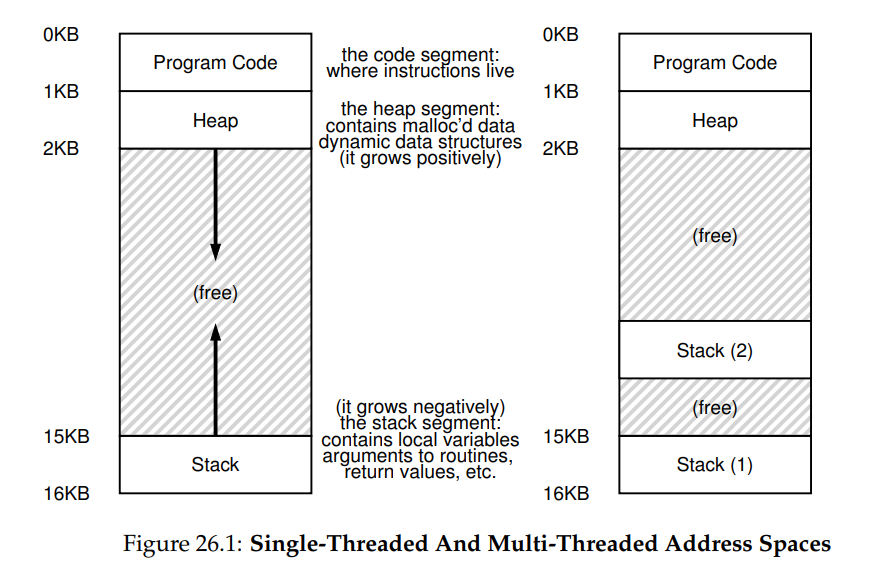
在該圖中,你可以看到兩個 stacks 分散在 process 的 address space 之中。 因此,所有放在 stack 上的變數、參數、回傳值以及其他資料都會被放進所謂的 thread-local storage,也就是對應 thread 的那個 stack
你或許也注意到,這樣的設計破壞了我們原先漂亮的 address space 佈局。 以往 stack 與 heap 可以各自成長,只有在 address space 用盡時才會出問題。 現在,我們不再享有那麼理想的狀況。 幸好通常這沒有太大影響,因為 stack 一般不需要很大(除非程式大量使用遞迴)
26.1 Why Use Threads?
在深入討論 thread 的細節以及撰寫 multi-threaded 程式時可能遇到的問題之前,先回答一個更簡單的問題:為什麼要使用 thread 呢?
事實上,至少有兩個主要理由說明為何你應該使用 thread。 第一個理由很直接:parallelism。 想像你正在撰寫一支程式,用來對非常大的 array 進行運算,例如將兩個大型 array 相加,或者把 array 內每個 element 的值加上一個常數。 如果你只在一顆 processor 上執行,做法很單純:逐項執行這些運算就結束了
然而,如果你在一台擁有多顆 processors 的系統上執行這個程式,你就有機會透過讓多顆 processors 各自處理部份工作,大幅加速整個流程。 把傳統 single-threaded 程式轉換成能在多顆 CPU 上分工執行此類工作的程式的過程稱為 parallelization,而採取「於每顆 CPU 上用一個 thread 來完成工作」的策略正是讓程式在現代硬體上跑得更快的自然且常見做法
第二個理由稍微隱晦一些:避免因為緩慢的 I/O 而阻塞程式進度。 想像你正在寫一支程式,需要執行各種 I/O:等待傳送或接收訊息,等待某個明確的 disk I/O 完成,甚至要(隱含地)等待 page fault 處理完畢。 與其空等,你的程式可能想在這段時間做點其他事情,例如利用 CPU 進行運算,甚至再發起更多 I/O 請求
使用 thread 是避免卡住的自然方法; 當程式中的某個 thread 在等待(也就是被阻塞等待 I/O)時,CPU scheduler 可以切換到其他已經準備好、能夠執行並做有用工作的 threads。 threading 讓單一程式內的 I/O 能與其他活動重疊,就像 multiprogramming 能在不同程式之間做到一樣; 因此,許多現代的 server-based applications(web servers、database management systems 等)在實作上都大量使用 threads
當然,在以上兩種情況中,你完全可以用多個 processes 來取代 threads。 不過 thread 共享同一份 address space,因此分享資料變得簡單,這也是撰寫這些程式時選擇 thread 的自然原因。 如果是邏輯上彼此獨立、幾乎不需要在記憶體中共用資料結構的工作,選用 processes 會更恰當
26.2 An Example: Thread Creation
讓我們來深入一些細節。 假設我們想要執行一個程式,這個程式會建立兩個 threads,每個 thread 各自做獨立的工作,在這裡分別印出「A」或「B」。 相關程式碼如圖 26.2 所示:
(Figure 26.2:Simple Thread Creation Code(t0.c))
#include <stdio.h>
#include <assert.h>
#include <pthread.h>
#include "common.h"
#include "common_threads.h"
void *mythread(void *arg) {
printf("%s\n", (char *) arg);
return NULL;
}
int main(int argc, char *argv[]) {
pthread_t p1, p2;
int rc;
printf("main: begin\n");
Pthread_create(&p1, NULL, mythread, "A");
Pthread_create(&p2, NULL, mythread, "B");
// join waits for the threads to finish
Pthread_join(p1, NULL);
Pthread_join(p2, NULL);
printf("main: end\n");
return 0;
}主程式會建立兩個 threads,它們都會執行函式 mythread(),但傳入的參數不同(字串 A 或 B)。 thread 一旦建立,可能立刻開始執行(取決於 scheduler 的心情),也有可能被放在「ready」而非「running」狀態,因此尚未執行。 當然,若是在 multiprocessor 上,這些 threads 甚至可能同時執行,但我們暫時先不管這種情況
建立完兩個 threads(我們稱它們為 T1 與 T2)之後,main thread 會呼叫 pthread_join() 來等待特定 thread 結束。 它會呼叫兩次,藉此確保 T1 與 T2 都已執行並完成,然後才讓 main thread 再次跑起來;當 main thread 執行時,會印出「main:end」並結束。 整個過程中總共使用了三個 threads:main thread、T1 以及 T2
接下來我們來檢視這個小程式可能的執行順序。 在執行圖(Figure 26.3)中,時間往下增加,每一欄顯示不同 thread(main、Thread 1 或 Thread 2)何時正在執行:
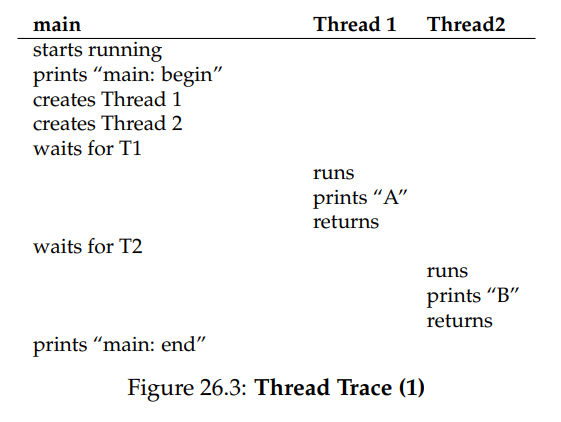
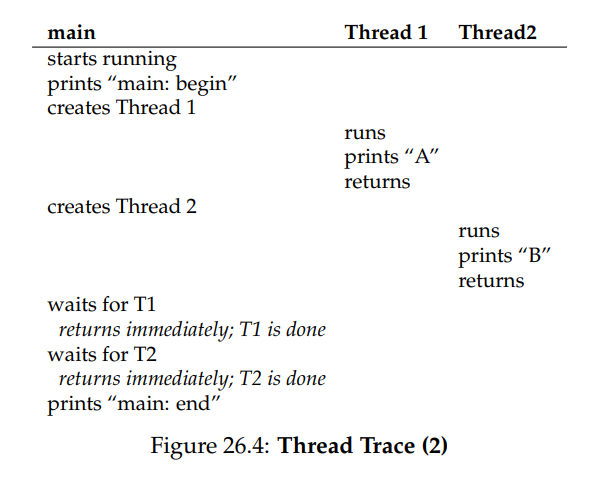
不過,要注意這並不是唯一的執行順序。 事實上,給定同一串指令,仍有相當多種可能,取決於 scheduler 在某個時刻決定執行哪個 thread。 例如,一個 thread 建立後可能立刻開始執行,這就會導致圖 26.4 所示的執行順序:
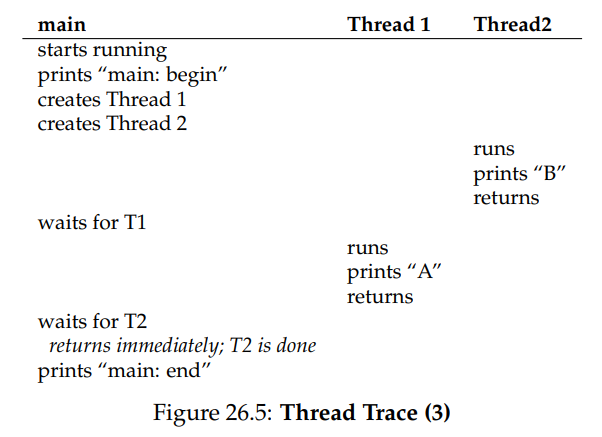
我們甚至可能先看到印出「B」再看到「A」,舉例來說,即使 Thread 1 較早被建立,scheduler 也有可能先執行 Thread 2,沒有任何理由必須假設先建立的 thread 就會先執行。 圖 26.5 展示了最後這種執行順序,Thread 2 在 Thread 1 之前搶先表現:
你或許已經發現,一種看待 thread 建立的方法是把它想成呼叫函式; 然而,系統並不是先執行該函式再回到呼叫端,而是為被呼叫的 routine 建立一條新的執行緒,該執行緒會獨立於呼叫端運行,有可能在 create 操作返回之前就開始,也可能拖到很久之後才執行。 接下來由哪個 thread 執行取決於 OS 的 scheduler,儘管 scheduler 通常採用合理的演算法,但我們很難預測在任意時刻究竟哪個 thread 會獲得 CPU
你也能從這個例子看出來,threads 會讓事情變複雜:光是想弄清楚何時會執行哪段程式就夠頭痛了。 沒有 concurrency,計算機系統已經很難理解,一旦引入 concurrency,情況只會變得更糟
26.3 Why It Gets Worse: Shared Data
前面那個簡單的 thread 範例說明了如何建立 threads,以及它們如何因 scheduler 的決策而以不同順序執行。 不過,這個範例沒有展示 threads 在存取共享資料時會如何互動。 接下來,假設有兩個 threads 想要更新一個全域共享變數。 我們要研究的程式碼列在圖 26.6,如下是一些程式碼說明
(Figure 26.6: Sharing Data: Uh Oh (t1.c))
#include <stdio.h>
#include <pthread.h>
#include "common.h"
#include "common_threads.h"
static volatile int counter = 0;
// mythread()
//
// Simply adds 1 to counter repeatedly, in a loop
// No, this is not how you would add 10,000,000 to
// a counter, but it shows the problem nicely.
//
void *mythread(void *arg) {
printf("%s: begin\n", (char *) arg);
int i;
for (i = 0; i < 1e7; i++) {
counter = counter + 1;
}
printf("%s: done\n", (char *) arg);
return NULL;
}
// main()
//
// Just launches two threads (pthread_create)
// and then waits for them (pthread_join)
//
int main(int argc, char *argv[]) {
pthread_t p1, p2;
printf("main: begin (counter = %d)\n", counter);
Pthread_create(&p1, NULL, mythread, "A");
Pthread_create(&p2, NULL, mythread, "B");
// join waits for the threads to finish
Pthread_join(p1, NULL);
Pthread_join(p2, NULL);
printf("main: done with both (counter = %d)\n",
counter);
return 0;
}首先,依照 Stevens 的建議 [SR05],我們把 thread 的建立與 join 的呼叫簡易包了一層封裝,若失敗便直接結束; 像這麼簡單的程式,至少要能偵測到錯誤發生,但不用做太聰明的處理(例如直接離開)。 因此,Pthread_create() 只是呼叫 pthread_create() 並確認回傳碼為 0; 若不是 0,Pthread_create() 就印出訊息並離開
其次,我們沒有為兩個 worker threads 各寫一份函式,而是讓它們共用同一段程式碼,並透過傳入參數(此處是字串)讓每個 thread 在輸出訊息前印出不同的字母
最後也是最重要的一點,現在我們來看每個 worker 要做的事情:把某個數值加到共享變數 counter 上,並在迴圈中重複 1,000 萬(1e7) 次。 因此預期的最終結果應為 20,000,000
接著我們編譯並執行程式,觀察其行為。 有時候,一切會如預期般運作:
prompt> gcc -o main main.c -Wall -pthread; ./main
main: begin (counter = 0)
A: begin
B: begin
A: done
B: done
main: done with both (counter = 20000000)遺憾的是,即使只用單顆 processor 執行這段程式碼,我們也不一定能得到預期的結果。 有時候會看到像這樣的輸出:
prompt> ./main
main: begin (counter = 0)
A: begin
B: begin
A: done
B: done
main: done with both (counter = 19345221)如果你再跑一次,答案還可能會又不一樣
prompt> ./main
main: begin (counter = 0)
A: begin
B: begin
A: done
B: done
main: done with both (counter = 19221041)因此我們最大的疑問是:為什麼會這樣?
Info
熟悉並善用你的工具
你應該持續學習新的工具,以協助撰寫、除錯並理解電腦系統。 在這裡我們使用一個很棒的工具,稱作 disassembler。 當你對可執行檔執行 disassembler 時,它會顯示組成程式的 assembly 指令。 例如,如果想了解更新 counter 的低階程式碼(就像本例那樣),可以在 Linux 上執行 objdump 來查看 assembly 程式碼
prompt> objdump -d main如此一來就會列出程式中所有指令,並帶有整齊的標籤(特別是在使用 -g 旗標編譯時),同時包含程式的 symbol 資訊。 objdump 只是你應該學會使用的眾多工具之一; 像 gdb 這樣的 debugger、valgrind 或 purify 等 memory profiler,以及不可或缺的 compiler,都是值得花時間深入了解的工具。 你越熟練這些工具,就越能打造出優秀的系統
26.4 The Heart Of The Problem: Uncontrolled Scheduling
要弄清楚為什麼會這樣,我們必須先了解編譯器為了更新 counter 所產生的指令序列長怎樣。 在這個例子中,我們只是想把 counter 加 1。 因此,在 x86 上對應的指令序列可能如下:
mov 0x8049a1c, %eax
add $0x1, %eax
mov %eax, 0x8049a1c此範例假設變數 counter 位於位址 0x8049a1c。 在這三條指令中,第一條 x86 的 mov 會先取出該位址的記憶體值並放入暫存器 eax。 接著執行 add,把 eax 的內容加 1(0x1)。 最後再用 mov 把 eax 的內容寫回同一個位址的記憶體
想像兩個 threads 當中的 Thread 1 進入了這段程式碼,準備把 counter 加一。 它先把 counter 的值(假設一開始是 50)載入自己的暫存器 eax,於是對 Thread 1 而言 eax = 50。 接著它把暫存器裡的值加一,因此 eax = 51
這時發生了不巧的事:計時器中斷響起; 於是 OS 會把目前正在執行的 thread 的狀態(它的 PC、包含 eax 在內的所有暫存器等)儲存到該 thread 的 TCB
更糟的是:OS 選擇讓 Thread 2 執行,它也進入了同一段程式。 它執行第一條指令,把 counter 的值讀到自己的 eax(記得:每個 thread 執行時都有自己私有的暫存器; context switch 程式碼會在切換時保存與回復它們)。 此時 counter 仍是 50,因此 Thread 2 的 eax = 50。 接下來假設 Thread 2 執行後兩條指令,先把 eax 加 1(變成 51),再把 eax 的內容寫回 counter(位址 0x8049a1c)。 於是全域變數 counter 現在變成 51
最後再次發生 context switch,Thread 1 回到 CPU 繼續執行。 回想它剛執行過 mov 與 add,此刻正要執行最後一條 mov,且 eax = 51。 因此最後的 mov 被執行,將值寫回記憶體,counter 再次被設成 51
換句話說,increment counter 的程式碼被執行了兩次,但 counter 從 50 只變成 51。 如果程式正確,counter 應該要變成 52
為了更清楚了解問題,我們來看一段詳細的執行追蹤。 假設在此例中,上述程式碼被載入到記憶體位址 100,排列如下(提醒一下,習慣了 RISC 類指令集的人要注意:x86 指令長度可變; 這條 mov 佔用 5 位元組,而 add 只佔了 3)
在這些假設下,實際發生的情況如圖 26.7 所示。 假設 counter 初始值為 50,請你仔細追蹤這個範例,確保你理解實際發生了什麼事:
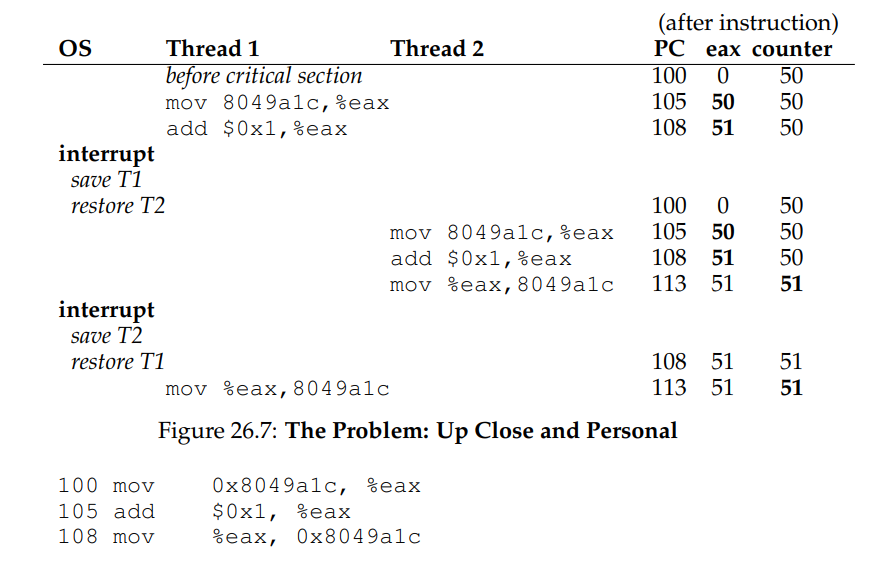
我們這裡展示的現象被稱為 race condition(更具體地說是 data race):結果會依程式執行的時機點而有所不同。 如果運氣不好(例如在執行的關鍵時刻發生 context switch),我們就會得到錯誤的結果。 事實上,每次執行可能都會出現不同的結果; 也就是說,原本應該是電腦擅長的 deterministic 計算,卻變成了 indeterminate 的狀況,輸出值難以預測,而且極可能每次都不同
由於多個 threads 同時執行這段程式碼會導致 race condition,因此我們稱這段程式碼為 critical section。 critical section 是指一段會存取共享變數(或更廣義地說,存取共享資源)的程式碼區段,必須保證不能同時被多個 thread 執行
對這段程式碼而言,我們真正想要的是 mutual exclusion(互斥)這個特性。 mutual exclusion 能保證:當某個 thread 正在 critical section 裡執行時,其它 threads 一定無法進入
順帶一提,這些術語幾乎全部都是由 Edsger Dijkstra 所創造的。 他是這個領域的先驅,並因這些貢獻與其他相關研究而獲得圖靈獎; 你可以參考他在 1968 年發表的〈Cooperating Sequential Processes〉一文,其中對這個問題有著極為清楚的描述。 在本章接下來的部分,我們還會再多次提到 Dijkstra 的貢獻
Info
使用原子操作
原子操作是建構電腦系統時最強大的一種底層技巧,從電腦架構,到 concurrent 程式碼(我們目前的主題),再到檔案系統(很快就會學到)、資料庫管理系統,甚至是 distributed system 都會用到 [L+93]
把一連串動作設計成「原子」的概念可以用一句話來總結:「要嘛全做,要嘛全不做」; 它看起來應該要像是,你想一起執行的所有動作要麼全發生了,要麼完全沒有發生,而不應該出現任何中間的過渡狀態。 有時候,我們會把多個動作合併成單一個原子操作,稱為 transaction(交易),這個概念在資料庫與交易處理的領域中被深入發展 [GR92]
在我們探索 concurrency 的主題中,我們會使用同步原語(synchronization primitives)來把短小的指令序列變成原子執行區段(atomic blocks of execution); 但「原子性」這個概念其實遠不止如此,接下來你會看到它的更廣泛應用。 例如,檔案系統會用 journaling 或 copy-on-write 等技術來讓硬碟上的狀態轉換具備原子性,這對於在系統故障時維持正確運作至關重要。 如果你現在還無法理解這些沒關係,在後面的章節你就會明白了
26.5 The Wish For Atomicity
解決這個問題的一種方式,是設計更強大的指令,讓我們能在單一步驟中完成所需的所有操作,從而消除中斷發生在不合時宜時刻的可能性。 比方說,假設我們有一條超級指令如下:
memory-add 0x8049a1c, $0x1假設這條指令會把某個值加到一段記憶體位置,並且硬體保證它的執行具備原子性; 也就是說,當這條指令被執行時,它會如期更新資料,不會在執行過程中被中斷。 這個行為是硬體提供的保證:當中斷發生時,要嘛指令還沒開始執行,要嘛已經完整執行完畢,不會出現任何中間狀態
在這裡,atomically 的意思是「整體作為一個單元」,有時我們會說是「all or none」。 對於剛剛的例子,我們理想上的作法是讓這三條指令一起被原子性地執行:
mov 0x8049a1c, %eax
add $0x1, %eax
mov %eax, 0x8049a1c就像我們說的,如果有一條單一指令可以做這件事,那只要發出該指令就搞定了,但一般情況下我們不會有這樣的指令。 想像你正在實作一棵 concurrent 的 B-tree,並希望更新它,你真的希望硬體支援一條「原子更新 B-tree」的指令嗎? 大概不會,至少在一套正常的指令集裡不會這麼設計
因此,我們真正要做的是請硬體提供一些實用的基本指令,讓我們可以在其上構建出一組通用的 synchronization primitives(同步原語)。 結合這些硬體支援與作業系統的協助,我們就能建立出能正確同步存取 critical section 的 multi-threaded 程式碼,從而在面對 concurrent 執行的複雜性時,仍能可靠地產出正確結果,這正是本章接下來要探討的問題
Info
要如何支援同步機制?
為了實作實用的同步原語,我們需要硬體提供什麼樣的支援? 我們又需要作業系統提供哪些協助? 我們要如何正確且高效地建構這些原語? 程式又該如何使用它們來達成預期的效果?
26.6 One More Problem: Waiting For Another
本章在描述 concurrency 問題時,彷彿只存在一種 thread 間的互動型態,也就是存取共享變數、以及為 critical section 提供原子性支援的需求。 然而實際上還有另一種常見的互動模式:一個 thread 必須等待另一個 thread 完成某項動作才能繼續執行。 例如,當一個 process 執行 disk I/O 而被 OS 強制 sleep 時,當 I/O 完成後,就需要把該 process 從睡眠中喚醒,讓它能夠繼續執行
因此,在接下來的章節中,我們不只會探討如何建構支援原子性所需的同步原語,也會學習如何實作這種「睡眠/喚醒」的機制,這在 multi-threaded 程式中非常常見。 如果你現在還無法理解這段內容沒關係,等你讀到 condition variable 那一章時就會明白了
Info
關鍵的並行術語
這四個術語在 concurrent 程式碼中極為核心,因此我們特別把它們獨立出來說明。 有興趣可以參考 Dijkstra 的早期研究 [D65, D68] 以了解更多細節
- Critical Section:指一段程式碼會存取共享資源,通常是變數或資料結構
- Race Condition(或 data race [NM92]):當多個 threads 幾乎同時進入 critical section,並同時嘗試修改共享資料結構時,就會發生 race condition,可能導致出人意料(甚至錯誤)的結果
- Indeterminate:一個 indeterminate 程式包含一個或多個 race conditions; 它的輸出會隨著每次執行的 thread 執行順序不同而變化,因此結果不是 deterministic 的,這違反我們對電腦系統通常應有的預期
- Mutual Exclusion:為了避免上述問題,threads 應該使用某種 mutual exclusion primitive; 這能保證在任何時間點,最多只有一個 thread 能進入 critical section,從而避免 race condition,並讓程式輸出變得 deterministic
26.7 Summary: Why in OS Class?
在結束之前,你可能會有個問題:為什麼我們要在作業系統課程中學這些東西? 答案可以用一個字來概括:「歷史」。 作業系統是第一個 concurrent 程式,許多相關技術都是為了 OS 而誕生。 後來,隨著 multi-threaded process 的出現,應用程式開發者也不得不開始面對這些問題
舉例來說,想像有兩個 processes 正在執行。 假設它們都呼叫 write() 來寫入同一個檔案,並都希望是 append,也就是把資料加到檔案的尾端,使其長度變大。 為了做到這件事,它們都必須配置新的硬碟區塊、更新該檔案 inode 中的區塊位置紀錄,並修改檔案大小來反映新的長度(還有其他細節,我們會在本書第三部分深入討論檔案系統)
由於中斷隨時可能發生,凡是負責更新這些共享結構(像是配置用的 bitmap、或是檔案的 inode)的程式碼都屬於 critical section; 因此,自從中斷這個機制被引入開始,OS 設計者就必須非常小心 OS 如何更新其內部資料結構。 如果中斷發生在不合時宜的時候,就會導致上面所描述的各種問題
因此,也就不令人意外地,像是 page table、process list、檔案系統結構,以及幾乎所有的 kernel data structures 都必須非常小心地存取,並透過適當的同步原語來保證其正確性
References
[D65] “Solution of a problem in concurrent programming control” by E. W. Dijkstra.
Communications of the ACM, 8(9):569, September 1965.
這是 Dijkstra 首篇探討 mutual exclusion 問題並提出解法的論文,不過該解法在現實中不太常用,因為需要進階的硬體與作業系統支援;我們會在後面幾章看到更多細節[D68] “Cooperating sequential processes” by Edsger W. Dijkstra, 1968.
可線上查閱:http://www.cs.utexas.edu/users/EWD/ewd01xx/EWD123.PDF。 這篇經典論文提出 multi-threaded 程式設計的整體思路與挑戰,是 Dijkstra 在荷蘭 Eindhoven 理工學院(Technische Hogeschool Eindhoven)所進行的早期工作之一;他當時開發的作業系統就叫做 “THE” OS(拼作 T-H-E,不發音成 “the”)[GR92] “Transaction Processing: Concepts and Techniques” by Jim Gray and Andreas Reuter.
出版:Morgan Kaufmann, 1992年9月
這是資料庫交易處理的經典聖經,由領域傳奇 Jim Gray 所著。 本書可說是 Jim Gray 將他對資料庫管理系統理解的全部傾囊而出。 可惜 Gray 幾年前不幸去世,對很多人來說是導師與朋友的巨大損失[L+93] “Atomic Transactions” by Nancy Lynch, Michael Merritt, William Weihl, Alan Fekete.
Morgan Kaufmann, August 1993.
這是一本關於 distributed systems 中原子交易的理論與實務的好書。 雖然略偏形式化,但內容很紮實[NM92] “What Are Race Conditions? Some Issues and Formalizations” by Robert H. B. Netzer and Barton P. Miller. ACM Letters on Programming Languages and Systems, Volume 1:1, March 1992.
這篇論文清楚區分並探討 concurrent 程式中 race condition 的不同類型。 本章與接下來幾章會以 data race 為主軸,後面則會拓展到一般性的 race condition[SR05] “Advanced Programming in the UNIX Environment” by W. Richard Stevens and Stephen
A. Rago. Addison-Wesley, 2005.
正如我們一再強調的那樣:買這本書吧,然後每天睡前讀一點。 它不只會幫助你入睡,更重要的是,它會讓你慢慢成為一位真正的 UNIX 程式設計師